![[LIFT] architects](/storage/layout/Header_025.png)
Entries from July 1, 2009 - July 31, 2009
Grasshopper G-Code Writer for Surface Milling
 AOP
AOP
 4 Comments
4 Comments
In this video, we will walk through how to setup a Grasshopper definition that will write the G-code for surface milling on a 3-axis CNC milling machine. When surface milling - the contouring engine is crucial. For speed reasons, I found the C# contouring definition written by Giulio Piacentino works extremely well because it allows the user to specify a step distance (tool path offset). After we have generated the contours (or tool paths) we can subdivide each curve, using the evaluate length component, to create a series of points which will guide the CNC mill head in order. Because we now have data structures, we can weave formatted text strings that have been derived from the point data into a G-code that will work with the ShopBot CAM software.
As in the previous example, we have formatted our text strings to work with the opensource CAM software, Shopbot. You can download a free version of the software here: http://www.shopbottools.com/controlsoftware.htm.
You can also check out this video in HD after the jump.
Note: This video is for demonstration purposes only. Andrew Payne and LIFT architects will not be held responsible for any damages that might arise from using this method. Please consult your machine's operating manual before implementing this fabrication method.
Grasshopper G-Code Writer for 2D Shape Milling
In this video, I will explain how to setup a Grasshopper definition that will write the G-code for 2D shape milling on a 3-axis milling machine. G-codes are the codes that position the tool and do the actual work, as opposed to M-codes which manages the machine. Actually, there are a whole host of different codes that can be written to control a CNC mill, however G-codes are what we are most interested in for this definition as it will allow us to streamline our fabrication process by sending the parametric data from Grasshopper directly to a CNC mill.
In this example I will be writing the tool path information for a 2D Vornoi Pattern generator, originally written by Sang Hoon Yoon. You can find his vornoi diagram definition on his site www.sac3.blogspot.com. This video explains how to use your data-structure (trees) to help weave together various text strings which control how the CNC mill head will operate.
I have formated the text strings to work with the open source ShopBot CAM software. This software is excellent for many reason, not least of which is the fact that it's free and has a large online help community... much like Grasshopper. It also allows the user to preview the cut even if their computer isn't connected to an actual CNC mill which can come in handy while testing out your cuts. Syntactically, ShopBot part files are setup slightly differently from traditional G-code which harkens back to the days when cutting files were stored on punched tape and it's format was optimized for brevity. You can find a lot of helpful resources on how to setup ShopBot part files in their Programming Handbook.
You can check out this video in HD after the jump.
Note: This video is for demonstration purposes only. Andrew Payne and LIFT architects will not be held responsible for any damages that might arise from using this method. Please consult your machine's operating manual before implementing this fabrication method.
University of Toronto 3-day Grasshopper Fabrication Workshop
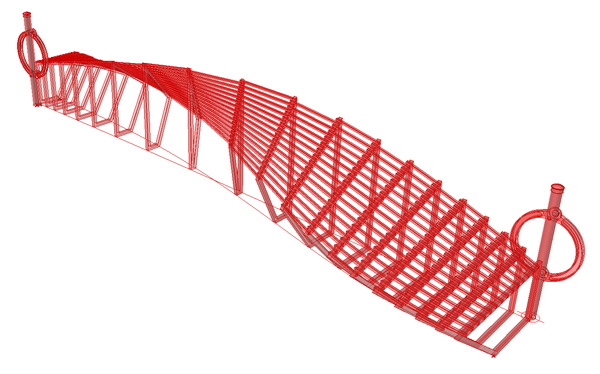
I am pleased to announce that I will be teaching a 3-day fabrication workshop at the University of Toronto from July 17th-19th. The first two days of the course will be set up to teach the fundamentals of the software plugin and we will work through a diverse range of topics. However, the third day will be focused on the construction of a full scale urban intervention where we will be using Grasshopper to facilitate the fabrication of a full scale prototype. We will examine Toronto's existing urban infrastructure, namely it's post and ring bicycle lock system, and develop a parasitic design that can be modified for each site's unique characteristics (such as volumetric dimensions (length, width, height), bike lock spacing, screening systems and solar orientation, and acoustical response. We will also be using a 5-axis CNC Mill (PADE Spin-W) capable of machining 1.2m in the z-axis and roughly a 2.5m x 2.5m x-y bed-size.
I'd like to thank Matthew Spremulli and Valentina Mele for helping organize the event. The workshop is open to University of Toronto students only and is currently sold out. I will be posting more about the workshop and some fabrication shots very soon. Stay tuned!
Update 21 July: Below are a few screenshots from the workshop hosted at the University of Toronto this past weekend. We really covered a lot of ground and the images below display an amazing amount of progress made for students who were completely new to the software system (after just 2 days).;)
;)
;)
;)
;)
;)
;)
;)